Electronic current limiting is not always a 100% effective way to prevent torque overloads in a mechanical system.
On a servo motor it is relatively easy to set torque limits in the parameter programming of the machine. When doing so, one must remember that the electronic torque limit is at the motor only. This means that the motor’s electronics do not account for the masses of gears, couplings, shafts, etc. further along down the drive line.

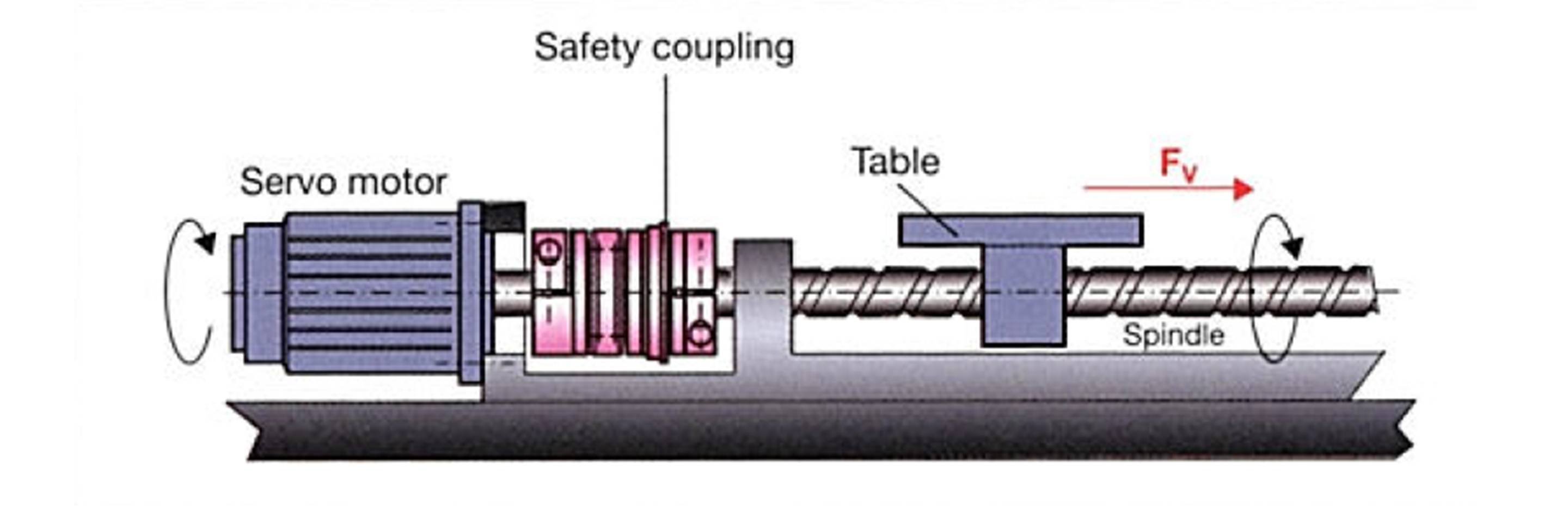
Often times a manufacturing process is many mechanical power transmission components away from the motor. Additionally, the servo drive and or PLC monitoring the torque of the motor may not pick up an over torque condition quickly enough to prevent damage from occurring. In the case of rotating equipment, there are often gearboxes and shafts which have a lot of rotating inertia not accounted for by electronic means. Additionally, linear applications impart their inertia into the rotating components driving them when they stop or crash. Precision mechanical torque limiters and safety couplings are often a good solution.